Re: Curiosity: Mars Science Laboratory
Posted: Mon Aug 06, 2012 5:11 am
http://www.nasa.gov/multimedia/nasatv/index.html
I'm watching here
I'm watching here
APOD and General Astronomy Discussion Forum
https://asterisk.apod.com/
Oh yeah, though I should be getting my beauty sleep. And we have touchdown! And pictures!!Anyone watching?
It was far more impressive because it was not pre-programmed at all. The probe was autonomous, but not simply following a script. It needed to adjust its course and attitude, compensate for variations in atmospheric density, and find a flat spot to land- all on its own. Pretty much every action that occurred during the descent and landing phase required analysis, calculation, and decision making on the part of the probe. A very slick operation, and a testament to superb engineering.THX1138 wrote:Hats off to all involved, The sky crane and the whole 9 yards went off without a hitch, This landing “ all pre-programmed “ was just about the coolest thing ever and I am so proud / happy / excited and in awe of what we have accomplished. Now looking forward to some great science, how long till that baby is up and running?
In ditching the sky crane, the parachute, etc... MSL was also autotomous:Chris Peterson wrote:It was far more impressive because it was not pre-programmed at all. The probe was autonomous, but not simply following a script. It needed to adjust its course and attitude, compensate for variations in atmospheric density, and find a flat spot to land- all on its own.THX1138 wrote:
Hats off to all involved, The sky crane and the whole 9 yards went off without a hitch, This landing “ all pre-programmed “ was just about the coolest thing ever and I am so proud / happy / excited and in awe of what we have accomplished. Now looking forward to some great science, how long till that baby is up and running?
http://en.wikipedia.org/wiki/Autonomy wrote:
<<Autonomy (Ancient Greek: αὐτονομία autonomia from αὐτόνομος autonomos from αὐτο- auto- "self" + νόμος nomos, "law", hence when combined understood to mean "one who gives oneself their own law") is a concept found in moral, political, and bioethical philosophy. Within these contexts, it is the capacity of a rational individual to make an informed, un-coerced decision.
Autonomy is not to be confused with Autotomy. Autotomy (from the Greek auto = "self-" and tomy = "severing") or self amputation is the act whereby an animal severs one or more of its own appendages, usually as a self-defense mechanism designed to elude a predator's grasp.
In moral and political philosophy, autonomy is often used as the basis for determining moral responsibility for one's actions. One of the best known philosophical theories of autonomy was developed by Kant. In medicine, respect for the autonomy of patients is an important goal of deontology, though it can conflict with a competing ethical principle, namely beneficence. Autonomy is also used to refer to the self-government of the people.
An Autonomous Space Craft might make certain decisions for itself based on imagery observation and a pre-programmed algorithm that will determine the only possible logical outcome and then perform that task without having to ask controllers NAND NOR AND types of parameters. Autonomy in Space does not relate to the socio-political definitions, here we are talking about a device that can make basic or convoluted decisions based on LOGIC (in an electronic usage).
To have true Autonomy however a device (or entity) would need to have a longer leash being able to complete complex missions without human intra direction. Such a system would say further automate the other elements of the total process making the whole of the "system" larger by including more devices that multicommunicate with each other without involving ground based technicians or communications. (the military might not want to send possibly interceptable signals to and from said same).>>
Chris Peterson wrote:
Pretty much every action that occurred during the descent and landing phase required analysis, calculation, and decision making on the part of the probe.
A very slick operation, and a testament to superb engineering.
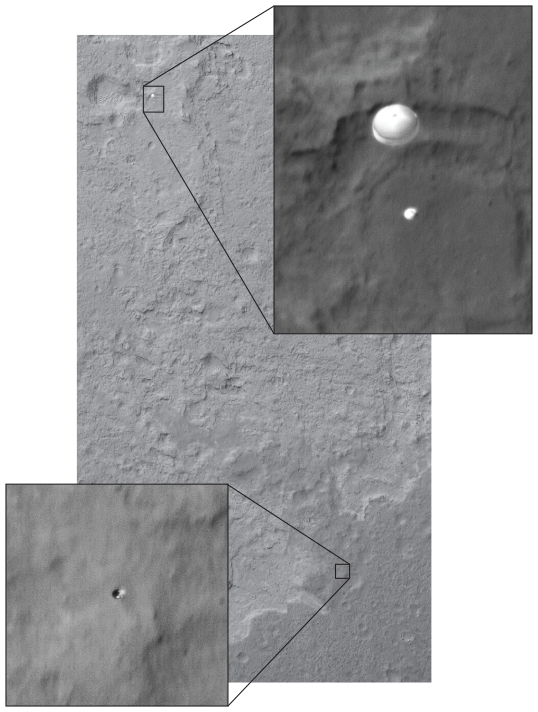
NASA's Curiosity rover and its parachute were spotted by NASA's Mars Reconnaissance Orbiter as Curiosity descended to the surface on Aug. 5 PDT (Aug. 6 EDT). The High-Resolution Imaging Science Experiment (HiRISE) camera captured this image of Curiosity while the orbiter was listening to transmissions from the rover. Curiosity and its parachute are in the center of the white box; the inset image is a cutout of the rover stretched to avoid saturation. The rover is descending toward the etched plains just north of the sand dunes that fringe "Mt. Sharp." From the perspective of the orbiter, the parachute and Curiosity are flying at an angle relative to the surface, so the landing site does not appear directly below the rover.
The parachute appears fully inflated and performing perfectly. Details in the parachute, such as the band gap at the edges and the central hole, are clearly seen. The cords connecting the parachute to the back shell cannot be seen, although they were seen in the image of NASA's Phoenix lander descending, perhaps due to the difference in lighting angles. The bright spot on the back shell containing Curiosity might be a specular reflection off of a shiny area. Curiosity was released from the back shell sometime after this image was acquired.
This view is one product from an observation made by HiRISE targeted to the expected location of Curiosity about one minute prior to landing. It was captured in HiRISE CCD RED1, near the eastern edge of the swath width (there is a RED0 at the very edge). This means that the rover was a bit further east or downrange than predicted.
The image scale is 13.2 inches (33.6 centimeters) per pixel.
Credit: NASA/JPL-Caltech/Univ. of Arizona
Just a quick update: new analysis of the incredible picture from the HiRISE camera on the Mars Reconnaissance Orbiter showing Curiosity parachuting to the surface of Mars has revealed a new detail: the rover’s heat shield:
Very cool! But it gets better: given when this shot was taken, and the lack of disturbed dust under the shield, it’s thought that this shows the heat shield still falling to the surface! It’s an action shot! The heat shield was the blunt end of the spacecraft that protected the rover from the heat of atmospheric entry, and was ejected about a minute and a half before landing. It would’ve hit the surface seconds after this shot was taken.
As I write this (23:30 UTC) I’m watching the press conference, and they’re showing video of the descent as seen by the rover itself, and it’s amazing! I’m sure this will be available soon, and when it is I’ll post it. [UPDATE (August 7, 00:15 UTC): The video has been released, and here's my post about it!
owlice wrote:Anyone watching? I'm watching here:
http://mars.jpl.nasa.gov/msl/multimedia/nasatv/
owlice wrote:Parachute deployed!
owlice wrote:YAY!!!!!!!
owlice wrote:Touchdown confirmed!
owlice wrote:Waiting for images....
owlice wrote:First images have arrived!
bystander wrote:Click to play embedded YouTube video.
- Script courtesy of owlice
owlice wrote:Anyone watching? I'm watching here:
http://mars.jpl.nasa.gov/msl/multimedia/nasatv/owlice wrote:Parachute deployed!owlice wrote:YAY!!!!!!!owlice wrote:Touchdown confirmed!owlice wrote:Waiting for images....owlice wrote:First images have arrived!